🎯 หุ่นยนต์เดินตามเส้น
เป้าหมายการเรียนรู้
ออกแบบหุ่นยนต์เดินตามเส้น ด้วยชุดการเรียนรู้ Wonder Building Kit
ชุดการเรียนรู้
ชุด micro:bit Wonder Building Kit
เตรียมอุปกรณ์
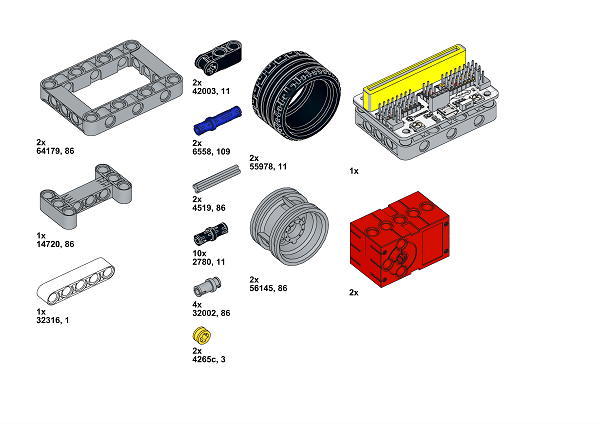
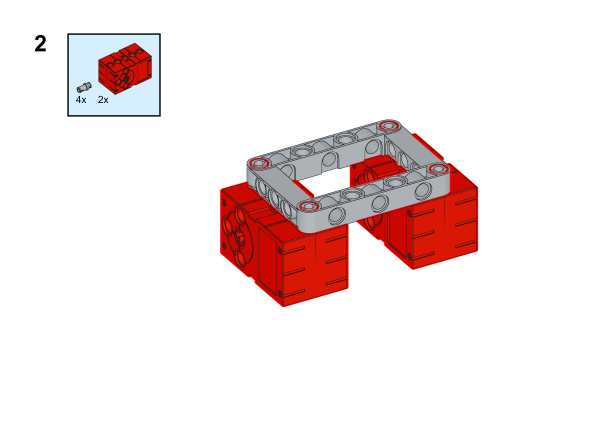
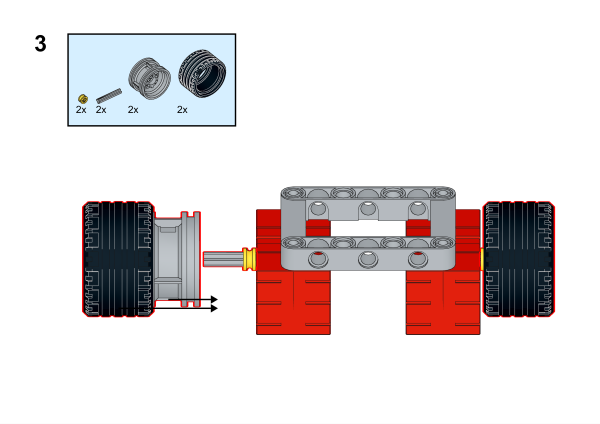
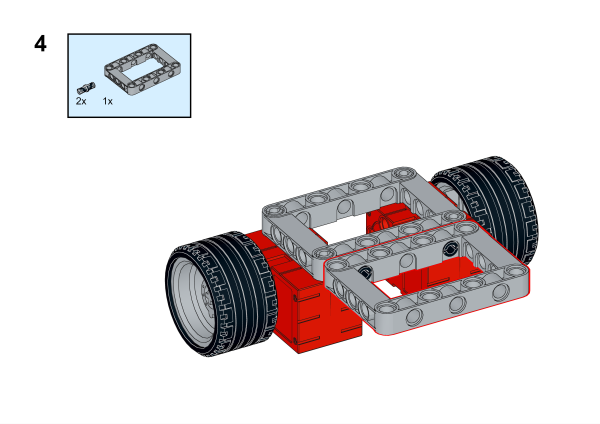
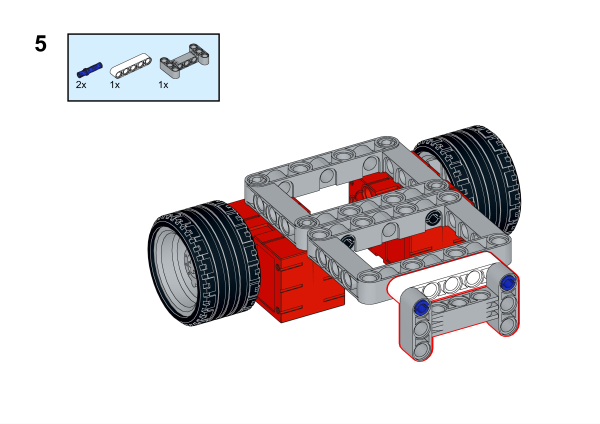
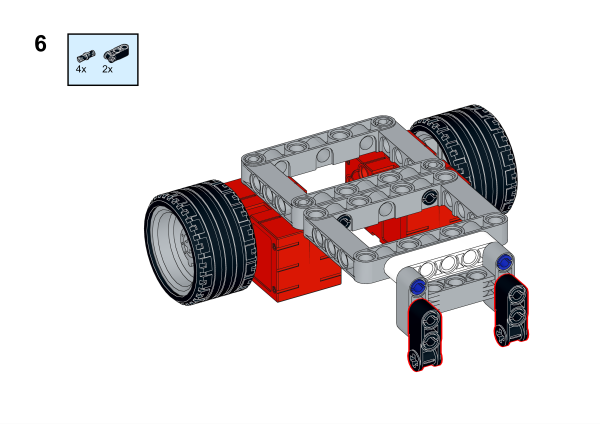
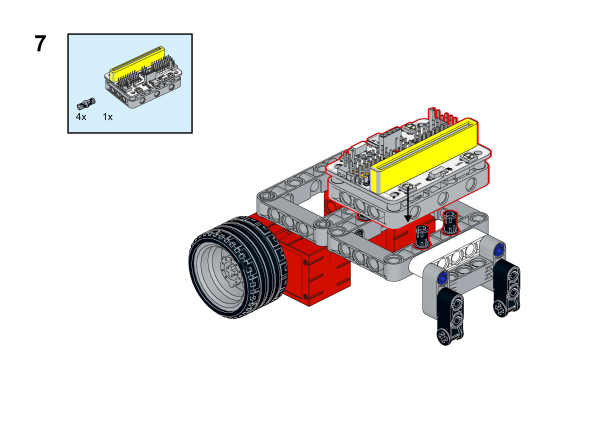
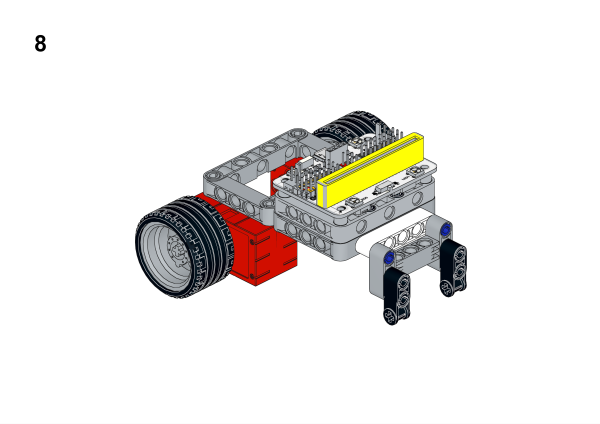
ขั้นตอนการประกอบ
คลิปสอนการประกอบ
🎬 https://youtu.be/J2QKDKnTklw

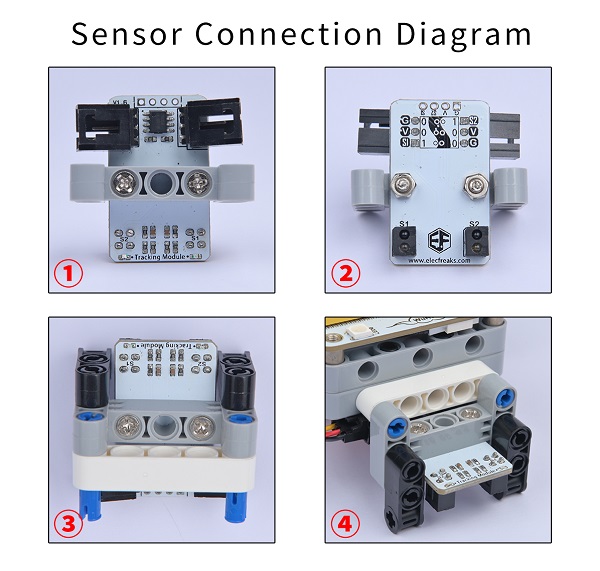
การติดตั้งเซนเซอร์
ติดตั้งเซนเซอร์ติดตามเส้น (tracking sensor) เข้ากับบริกดังภาพด้านล่าง
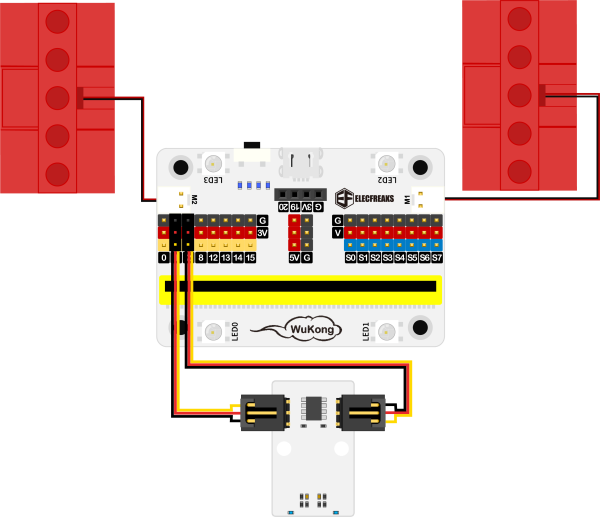
การเชื่อมต่ออุปกรณ์
เชื่อมต่อมอเตอร์ทั้งสองตัว ไปยังตำแหน่ง M1 และ M2 บนบอร์ดขยาย Wukong breakout board.
ซอฟต์แวร์ที่ใช้
ขั้นตอนการเขียนโปรแกรม
การติดตั้งส่วนขยาย
คลิปที่เมนู "Advanced" ในโปรแกรม MakeCode จากนั้นคลิกที่ Extensions (ส่วนขยาย)

- ในช่องค้นหา ให้พิมพ์ชื่อ "wukong" เพื่อค้นหาส่วนขยาย
- คลิกที่ชื่อส่วนขยาย "wukong"

จากนั้นจะพบเมนู "WuKong" ปรากฏอยู่บนแถบเมนูด้านข้าง

ตัวอย่างการเขียนโปรแกรม
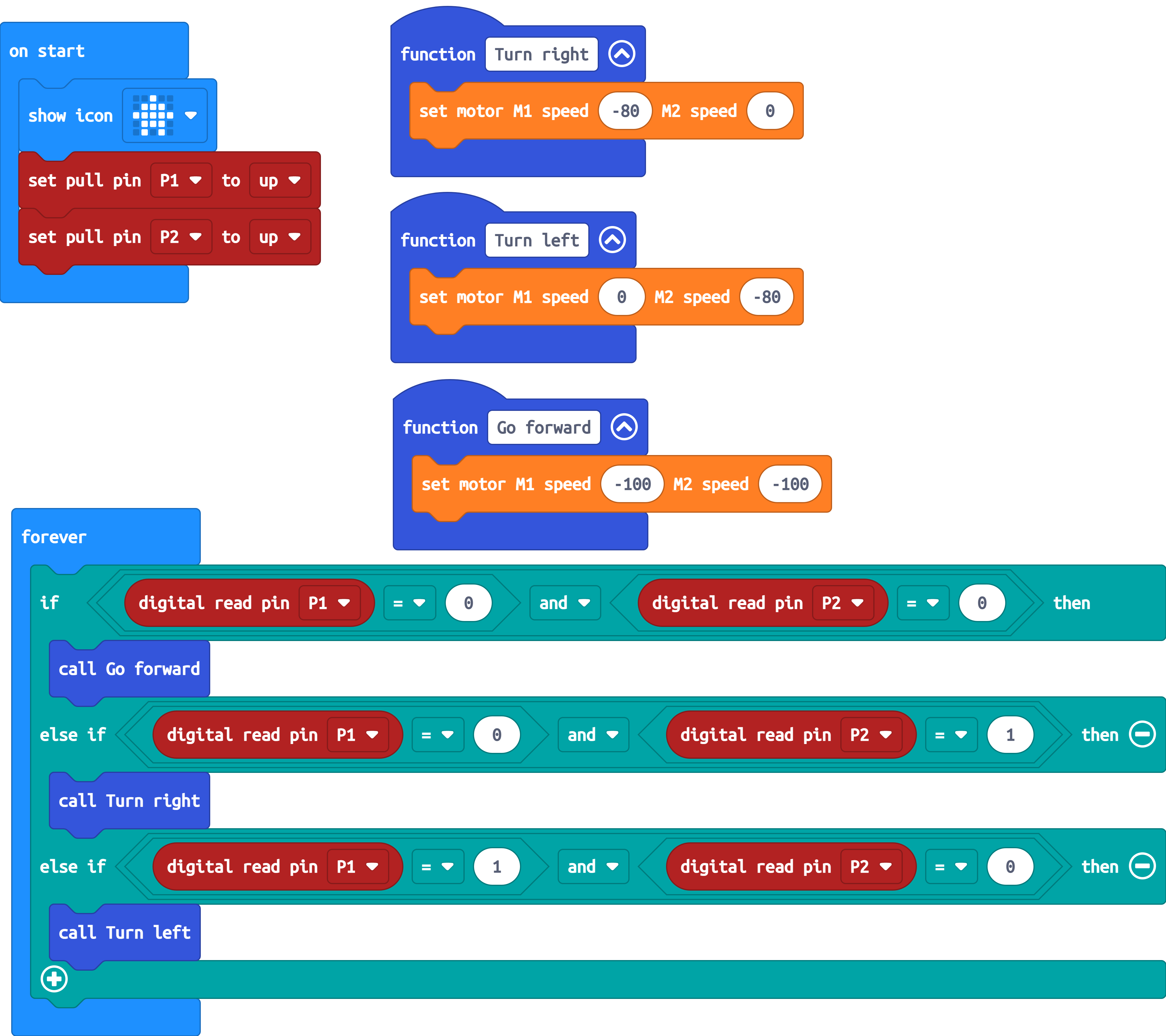
Link:https://makecode.microbit.org/_RXCL9zU1pW5m
ผลลัพธ์
หุ่นยนต์จะเคลื่อนที่ไปตามเส้นดำบนแผ่นสนามด้วยความเร็วคงที่