การควบคุมหุ่นยนต์ให้เคลื่อนที่ไปข้างหน้า
ตัวอย่างโค้ดประกอบการเรียนรู้
Robot-forward.hex download
1. เป้าหมายการเรียนรู้ ⭐

ลองเขียนโปรแกรมแรกเพื่อสั่งงานให้หุ่นยนต์ micro:bit robot car วิ่งไปข้างหน้าด้วยความเร็วคงที่
2. คลิปประกอบการเรียนรู้ ⭐
3. สิ่งที่ต้องเตรียม ⭐
3.1 เตรียมอุปกรณ์
- สาย micro usb x1
- หุ่นยนต์ micro:bit robot car
3.2 การเชื่อมต่ออุปกรณ์
เชื่อมต่อสาย usb ระหว่างบอร์ด micro:bit และคอมพิวเตอร์
3.3 ซอฟต์แวร์ที่ใช้
4. ขั้นตอนการเขียนโปรแกรม ⭐
4.1 การติดตั้งส่วนขยายหุ่นยนต์
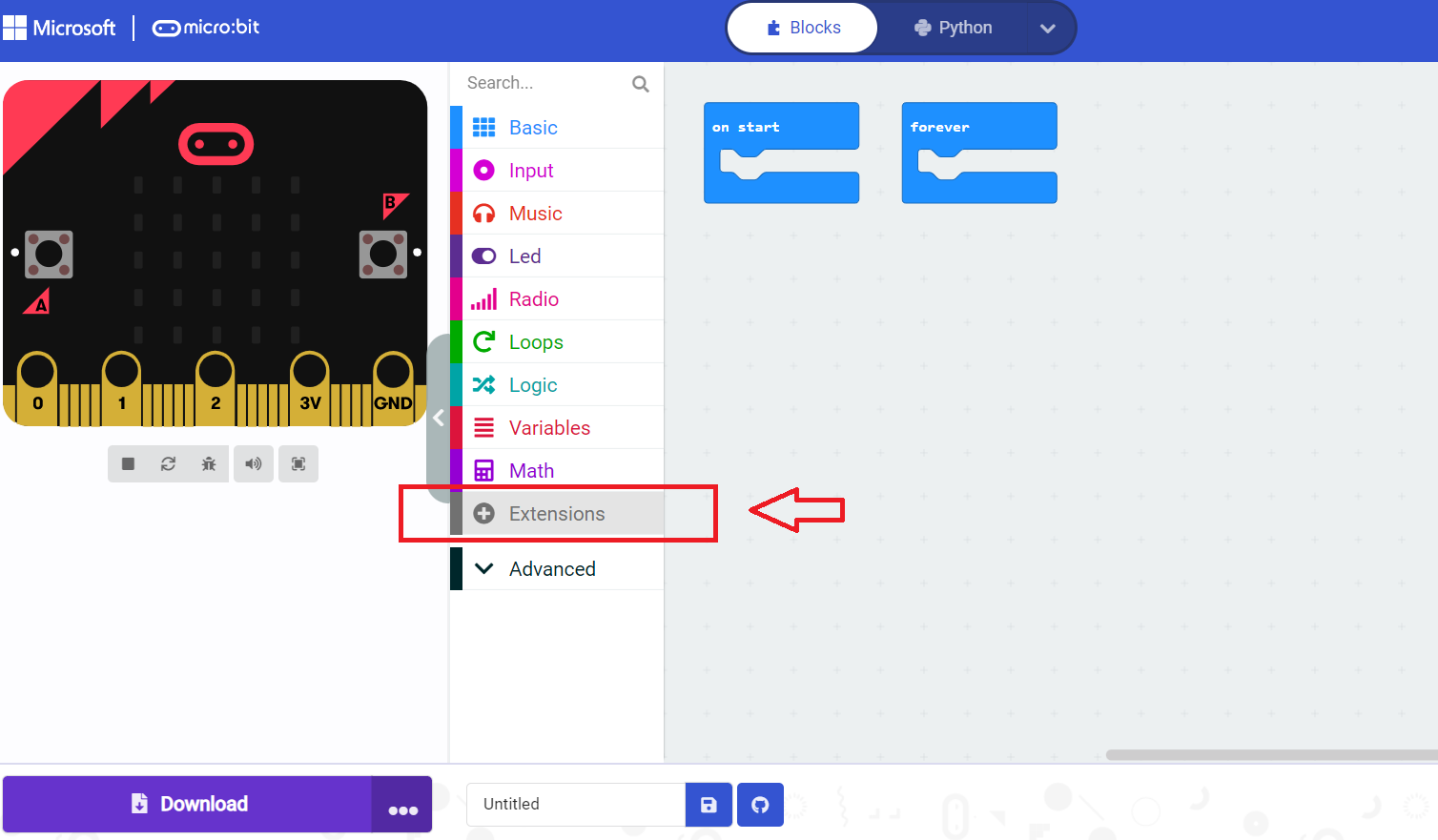
คลิกที่เมนู Extensions เพื่อเพิ่มส่วนขยาย
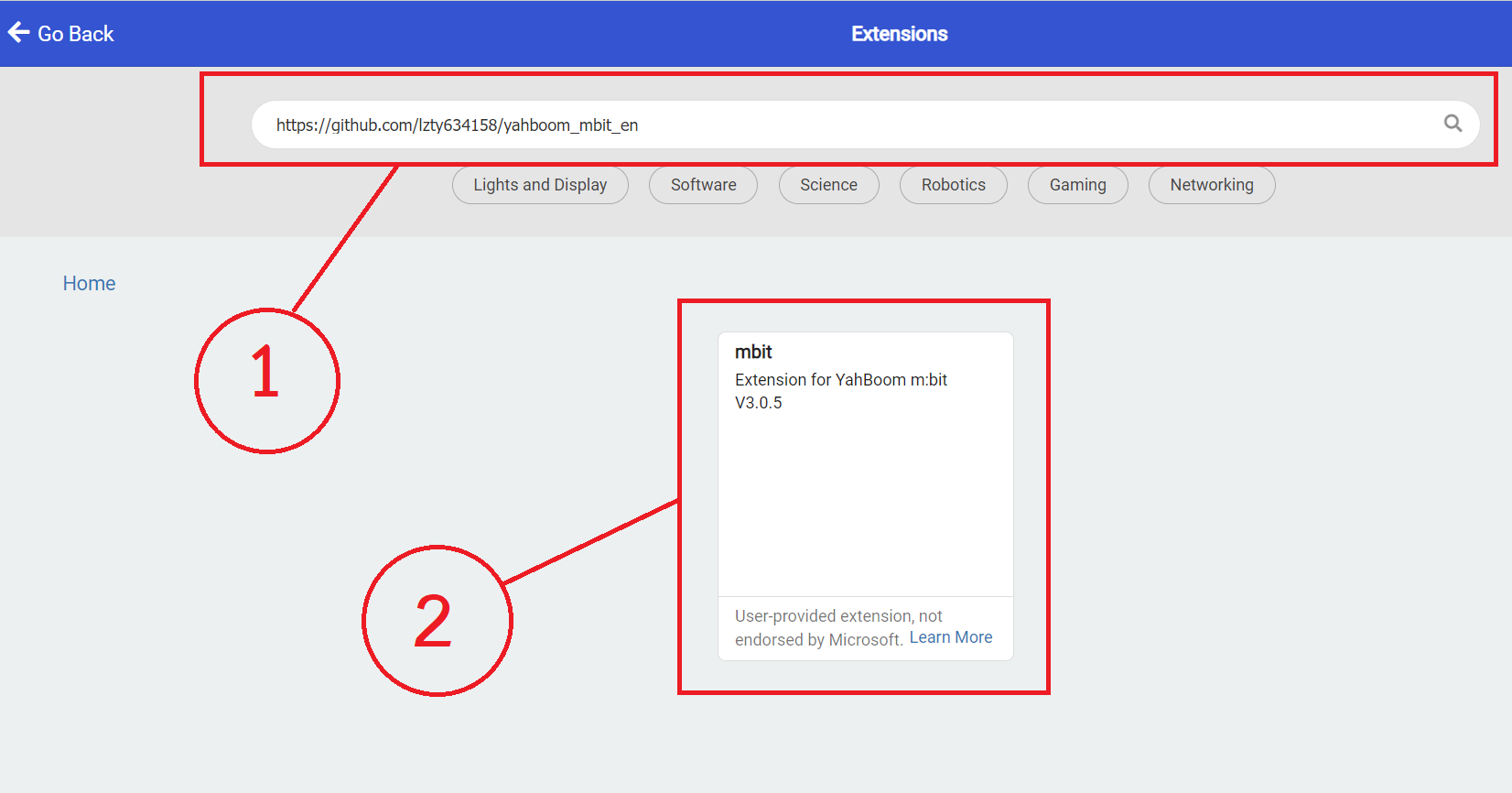
คัดลอกลิงก์นี้ https://github.com/lzty634158/yahboom_mbit_en และนำไปวางในช่องค้นหา และกดค้นหา 🔍
คลิกที่ส่วนขยาย mbit
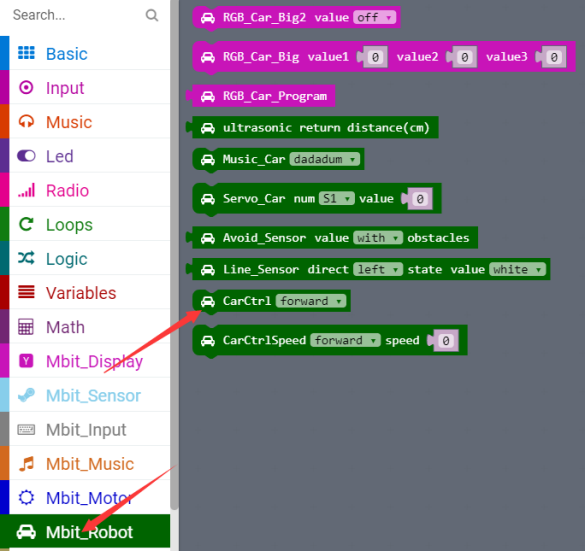
คำสั่งหุ่นยนต์พร้อมใช้งาน
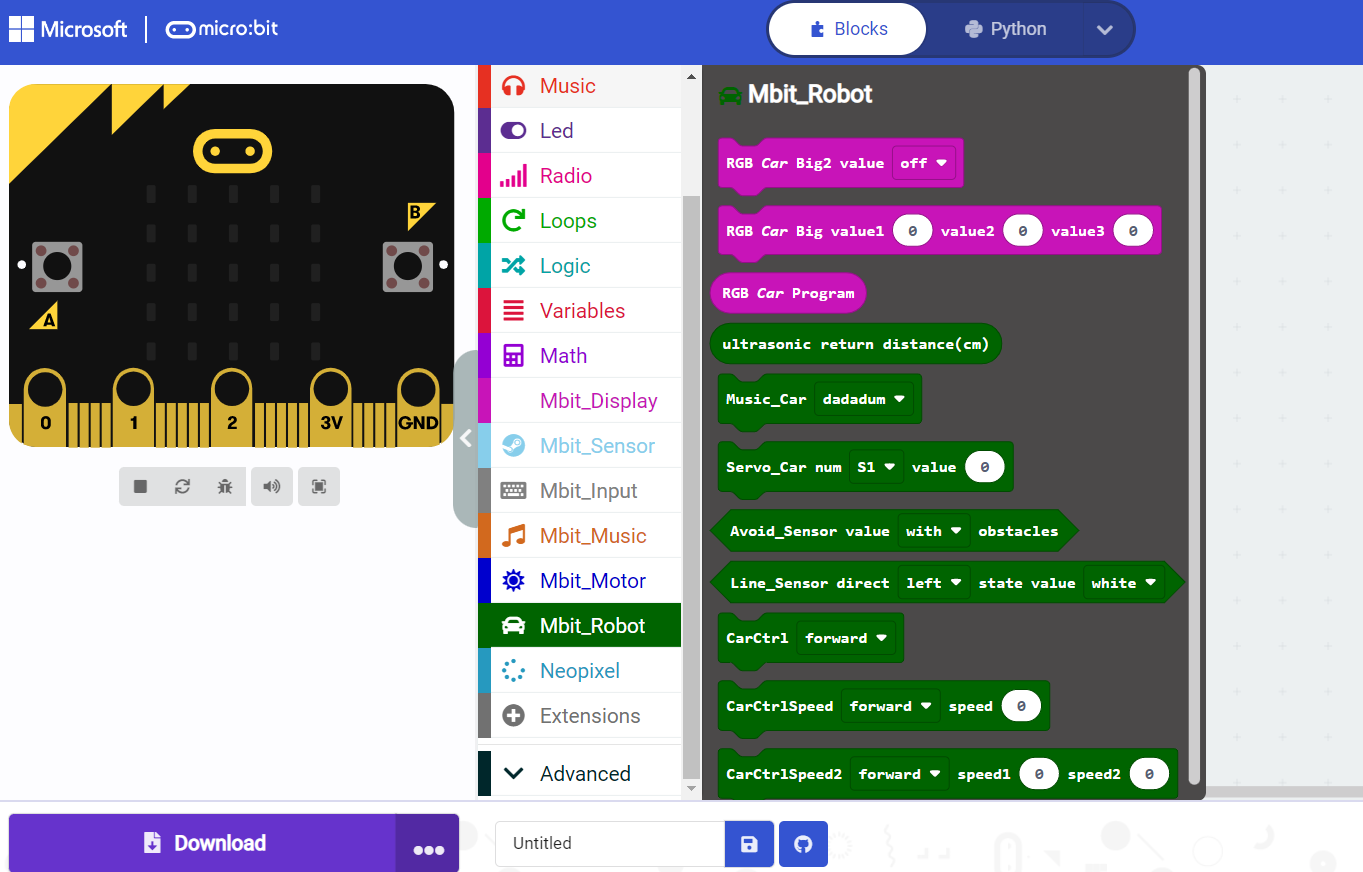
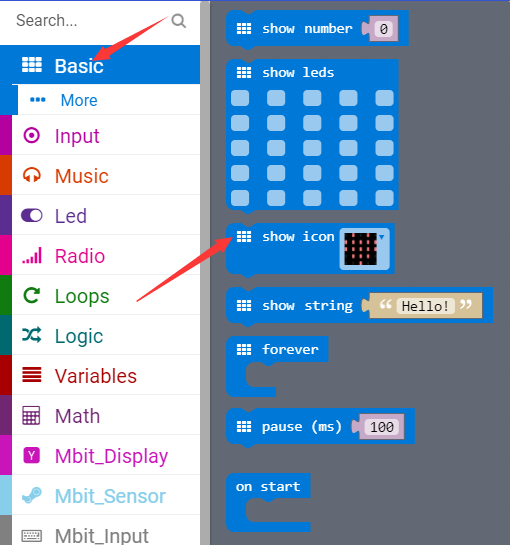
4.2 บล็อกคำสั่งที่ใช้
4.3 ตัวอย่างโปรแกรมที่สมบูรณ์
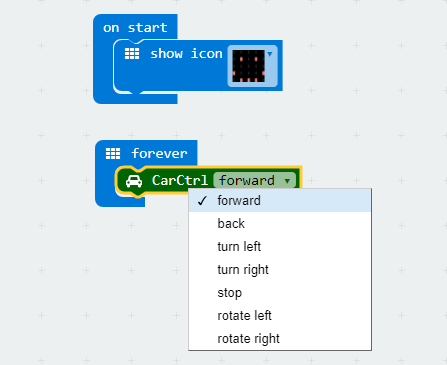
5. ภารกิจท้าทาย 🚀
หลังจากที่เราดาวน์โหลดโปรแกรม และอัพโหลดโค้ดโปรแกรมไปยัง micro:bit และติดตั้งบนหุ่นยนต์ เมื่อเปิดสวิตช์หุ่นยนต์เริ่มทำงาน จะเห็นว่าหุ่นยนต์กำลังวิ่งไปข้างหน้าเพียงอย่างเดียว คราวนี้เรามาลองปรับแก้โค้ด เพื่อทำให้หุ่นยนต์เคลื่อนที่ถอยหลังและหมุนกลับ จะทำอย่างไร